はじめに
今回は、3種類の異なるLoRaWANセンサーデバイスとダウンリンクコマンドを組み合わせたスマートなゴミ箱モニタリングシステムのデモをご紹介したいと思います。 なお、当該デモは、来週11月20日(水)から22日(金)まで、パシフィコ横浜展示ホールで開催される「EdgeTech+ 2024」で、アヴネット株式会社様のブース(AZ-19)にてご覧いただけます。
デモシステムの概要
主要な特長
1. 複数センサーの協調動作
- クラウドアプリケーションを介して、異なる種類のセンサーデバイスが連携
- 各デバイスの特性を活かした統合的なモニタリングを実現
- リアルタイムなデータ収集と状態判断による自動制御
2. マルチデバイス同時制御
- 状況に応じて複数のデバイスへ同時にダウンリンクコマンドを送信
- 距離センサーの検知をトリガーとして、LED制御とカメラ画像取得を連動させる
- 異なるデバイスタイプに対する統一的な制御を実現
システム構成デバイス
1. ELmote EM-ELDS01 LiDAR距離センサー
- Dragino DS20Lの日本市場向けモデル
- LiDARを用いた高精度な距離計測が可能
- ゴミ箱の収容量監視に使用

2. LT-22222-L 汎用I/Oセンサー
- デュアルリレースイッチ搭載
- 状態表示用LED制御(LEDは外付け)
- 緑色LED:余裕がある状態
- 赤色LED:満杯に近い状態
- LoRaWAN Class Cに対応し、即時的なダウンリンク制御(リレー出力の遠隔制御)が可能
3. AIS01 AIカメラセンサー
- 状況確認用の画像取得
- ダウンリンクコマンドによる遠隔制御
- 異常状態の視覚的確認が可能
- AI機能による画像解析(メーターの読み取り)にも対応
システム構成と動作フロー
システム構成図
graph TD
subgraph "エッジデバイス層"
A[EM-ELDS01<br>LiDAR距離センサー] -->|距離| D
B[LT-22222-L<br>I/Oセンサー] -->|リレーの状態| D
C[AIS01<br>AIカメラ] -->|画像データ| D
D -->|ダウンリンク| B
D -->|ダウンリンク| C
end
subgraph "ネットワーク層"
D[LoRaWANネットワーク]
end
subgraph "クラウドアプリケーション層"
E[データ収集・分析]
F[インテリジェント制御]
G[ダッシュボード表示]
H{イベント判定} -->|満杯検知| I[マルチデバイス<br>同時制御]
end
D -->|アップリンク| E
E --> F
F --> H
I -->|リレー制御| D
I -->|画像転送指示| D
F --> G
style A fill:#f9f,stroke:#333,stroke-width:2px
style B fill:#bbf,stroke:#333,stroke-width:2px
style C fill:#bfb,stroke:#333,stroke-width:2px
style D fill:#ddd,stroke:#333,stroke-width:2px
style E fill:#fbb,stroke:#333,stroke-width:2px
style F fill:#bfb,stroke:#333,stroke-width:2px
style G fill:#fbf,stroke:#333,stroke-width:2px
style H fill:#ff9,stroke:#333,stroke-width:2px
style I fill:#f99,stroke:#333,stroke-width:2px
classDef control fill:#f96,stroke:#333,stroke-width:2px;
class I control;
動作シーケンス
1. 通常状態監視
- EM-ELDS01が定期的に距離データを送信
- クラウドアプリケーションで閾値判定
- 余裕がある場合は、LT-22222-Lへダウンリンク
0x300100(リレー1: ON, リレー2: OFF)で、緑色LED点灯
2. 満杯検知時の動作
- 距離データが閾値を下回った場合、LT-22222-Lへダウンリンク
0x300001(リレー1: OFF, リレー2: ON)で、赤色LED点灯 - AIカメラセンサーへへダウンリンク
0x0B01設定し、画像転送指示 - 最新状態をクラウドアプリケーションで表示
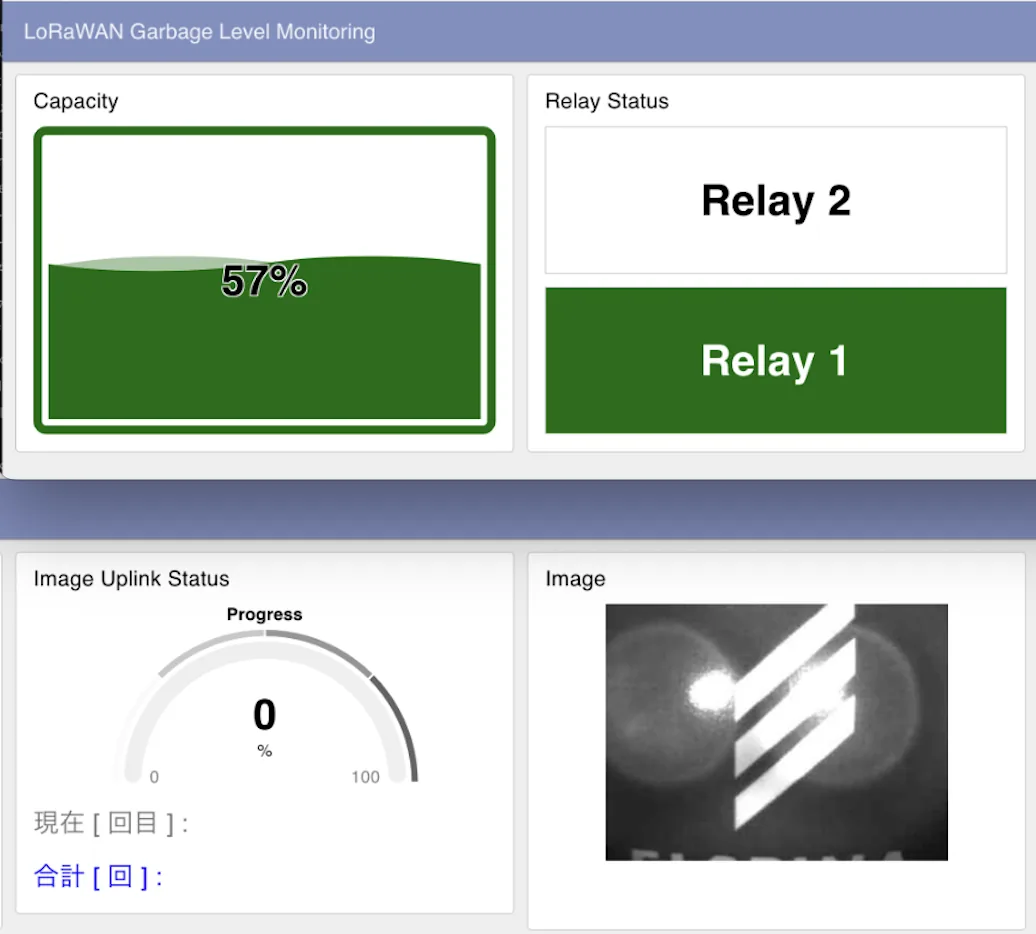
クラウドアプリケーション表示内容
- ゴミ箱の満杯状況
- リレー=LED状態(緑/赤)
- 最新のカメラ画像
デモ動画
デモ動画です。
- 距離センサーに板を近づけて満杯状態になるようにさせます。
- 画面左側の緑色LEDが消えて、黄色LED(赤が手元になく、、、)が点灯します。
- 少し遅れることiPadのダッシュボード画面の緑色部分が赤色に変わります。
- その後、時間を要しますが、一つ一つ長い道のりで動画データが複数回に分けて届き、最後にダッシュボード画面右側に表示されます。
想定される活用シーン
本デモシステムは以下のような用途での活用が期待できます:
- 商業施設のゴミ箱管理
- スマートシティの廃棄物管理
- 工場・倉庫での資材管理
- 公共施設の設備監視
展示会情報
EdgeTech+ 2024
- 会期:2024年11月20日(水)~22日(金)
- 会場:パシフィコ横浜展示ホール
- ブース番号:AZ-19(アヴネット株式会社様)
- 公式サイト:EdgeTech+ 2024
おわりに
本デモは、LoRaWANの特長であるダウンリンクによる遠隔制御機能を複数のセンサーデバイスで利用し、実用的なソリューションを容易に構築できることを示しています。
ぜひ展示会場にお越しいただき、実際のデモをご覧ください。また、各製品の詳細な仕様や、お客様固有の用途についてもご相談を承ります。
皆様のご来場を心よりお待ちしております。
担当
- ブログ全体の構成と執筆・コーディング担当: Claude 3.5 Sonnet
- ネタ提供、動作確認・コード修正、文書の最終微調整&文責: 私